A few years ago, there was a desktop robotic arm craze happening (as the Arduino was getting popular). uArm by the uFactory was one of the most popular models at the time
https://www.kickstarter.com/projects/ufactory/uarm-put-a-miniature-industrial-robot-arm-on-your
And the plans were quickly copied by enthusiasts. There's a bunch already on Thingiverse. The problem is that these were mostly stepper based. That's great for quickly and cheaply getting a working arm, but not so great for accuracy
I'm tempted to redo this arm for steppers to get OpenSCAD practice

{kind=link}
{kind=link}
{kind=link}
{kind=link}
@cypnk The big problem with steppers in this sort of application is that they don't have much holding power. The weight of the arm and any payload will require a very high current to prevent skips, which causes the motors to become really hot.
{kind=link}
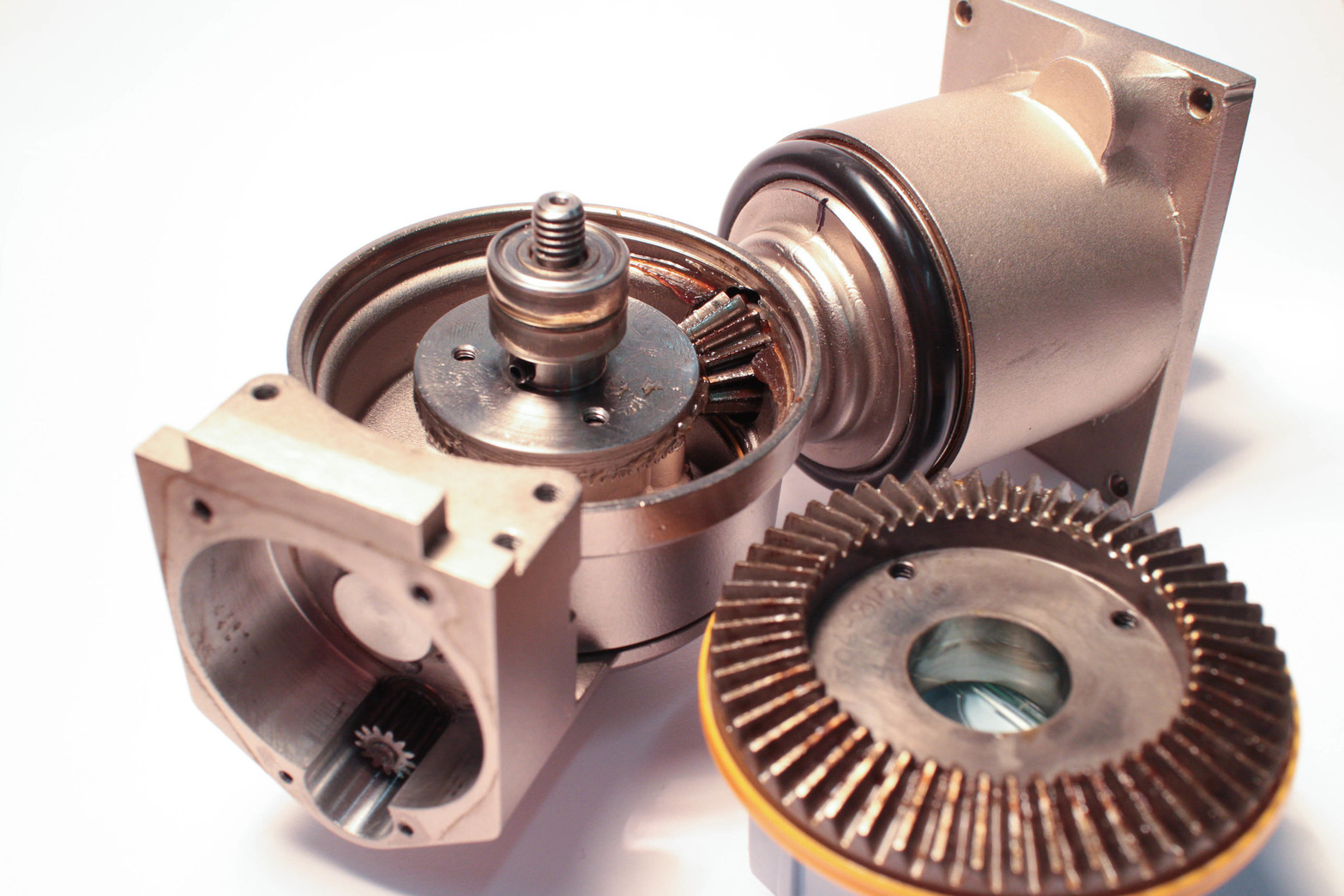
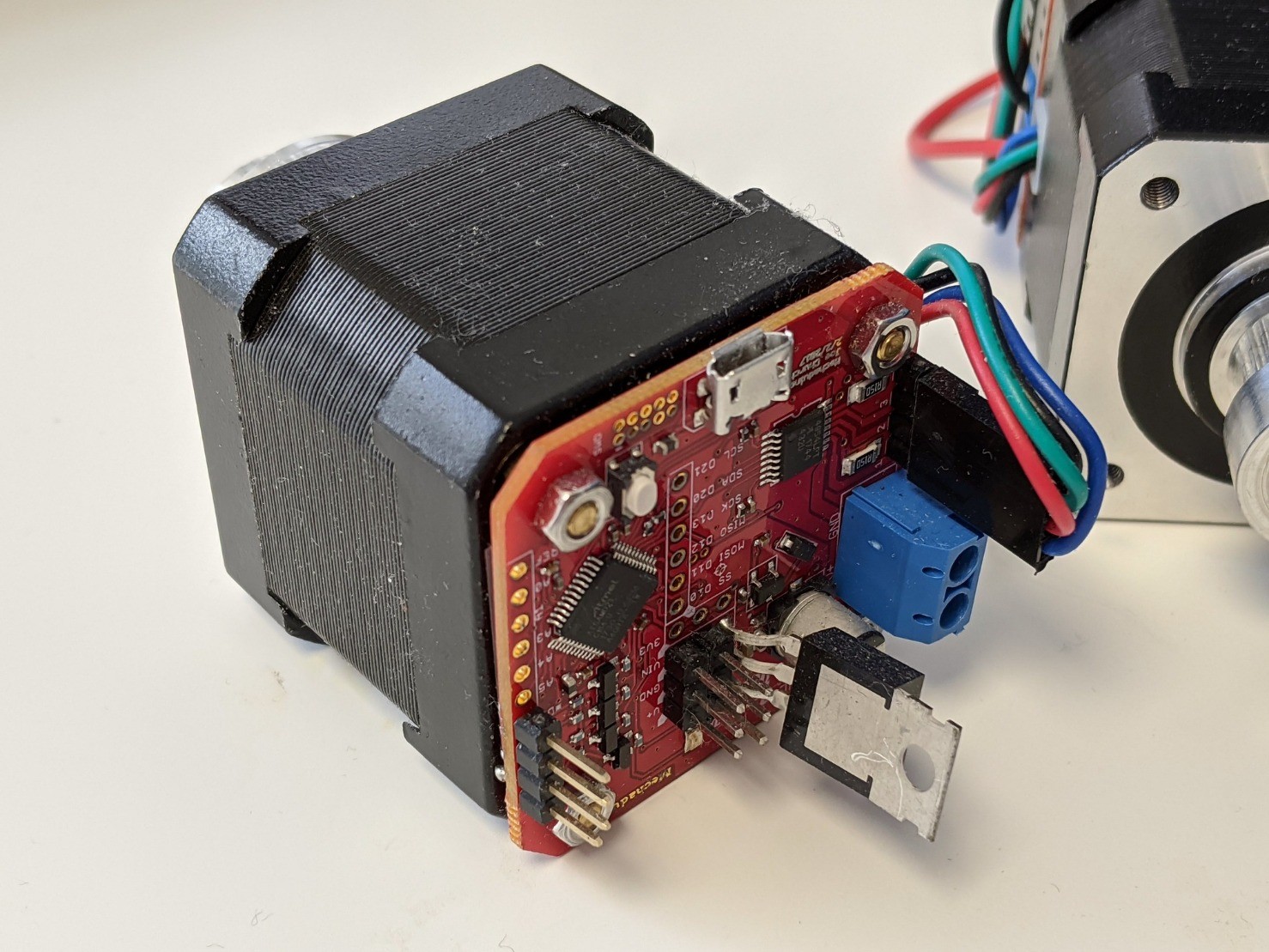
@cypnk If you can add an encoder for closed loop control, this allows the power to be ramped up as needed. The "Mechaduino" has a neat Hall Effect encoder (AD5047D) combined with a stepper driver that fits on the back of a NEMA-17 motor.
{kind=link}

@th I have a few stepper motors I salvaged from a bunch of electronics that I wonder can be reused here. It’s probably going to be the most challenging thing I’ve tried in 3D. Much more than the cabin design