A few years ago, there was a desktop robotic arm craze happening (as the Arduino was getting popular). uArm by the uFactory was one of the most popular models at the time
https://www.kickstarter.com/projects/ufactory/uarm-put-a-miniature-industrial-robot-arm-on-your
And the plans were quickly copied by enthusiasts. There's a bunch already on Thingiverse. The problem is that these were mostly stepper based. That's great for quickly and cheaply getting a working arm, but not so great for accuracy
I'm tempted to redo this arm for steppers to get OpenSCAD practice
Most of these are very similar in functionality. They are definitely inspired by the ABB robotic arm
I'm sure the joints can be scaled up to fit steppers since that's what the original arm used

{kind=link}
{kind=link}
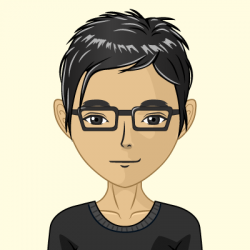
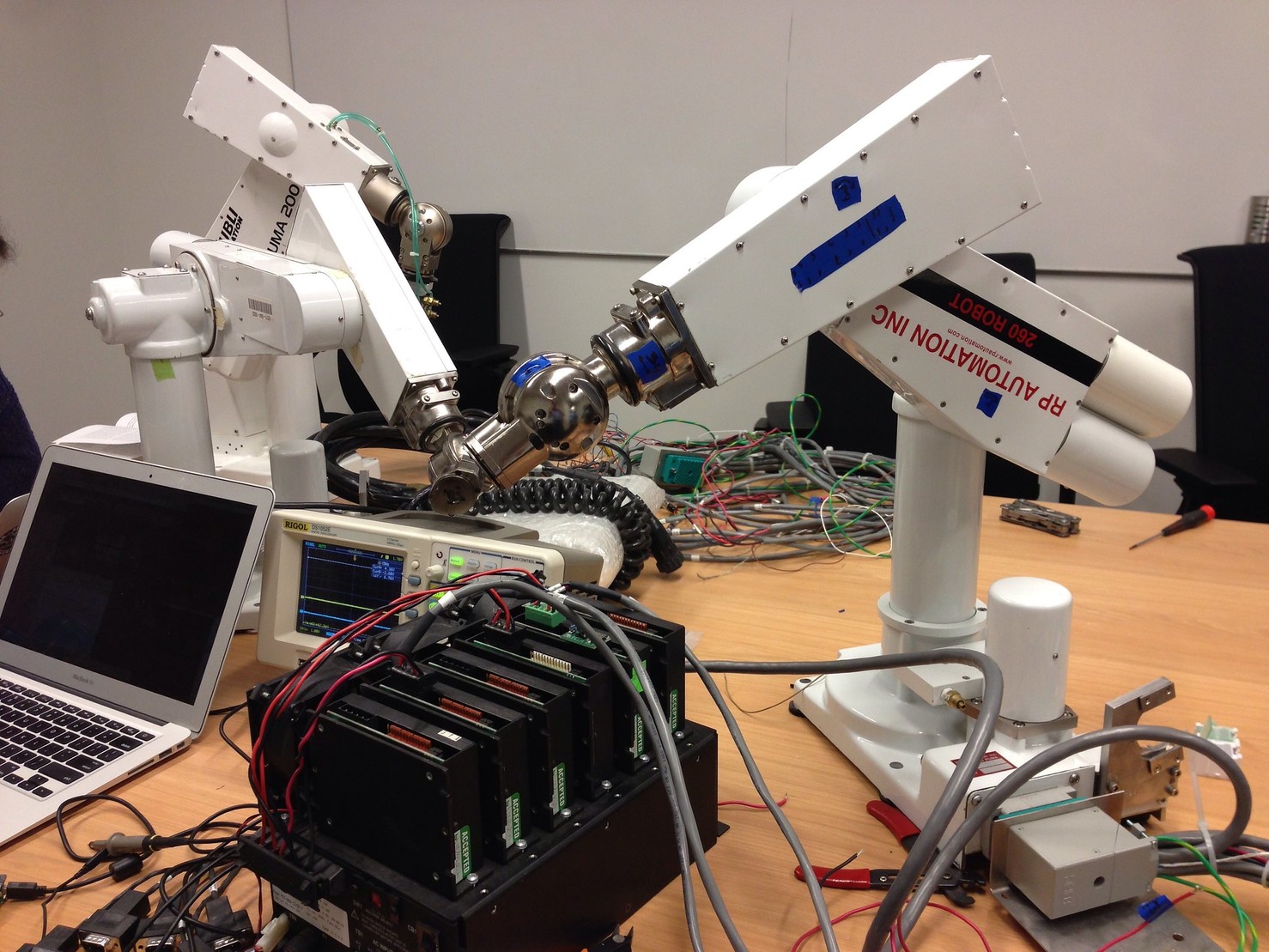
@cypnk the first three axes of the puma 6dof arm might be easy to redesign, although the last three in the wrist would be a challenge.
{kind=link}
{kind=link}
{kind=link}

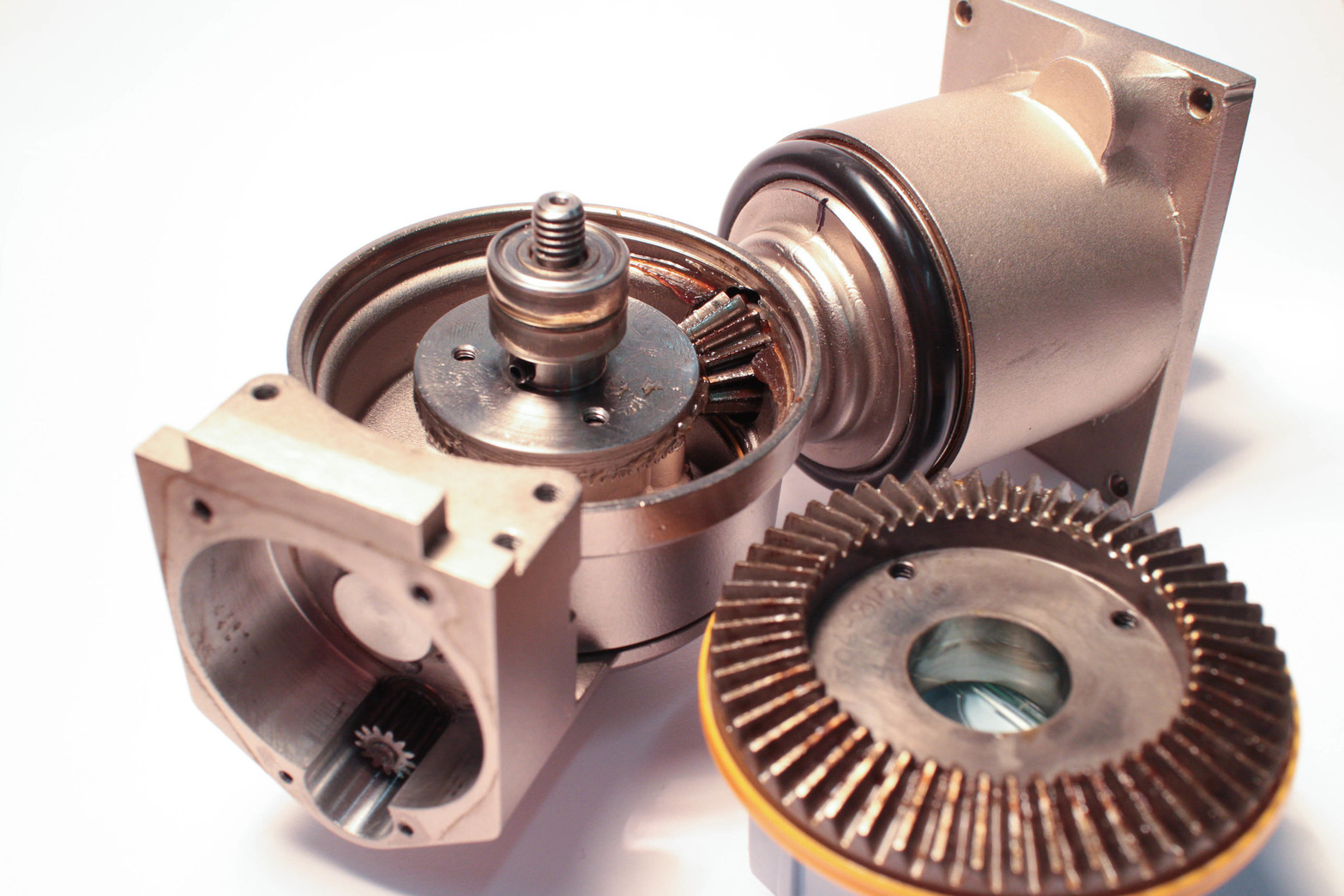
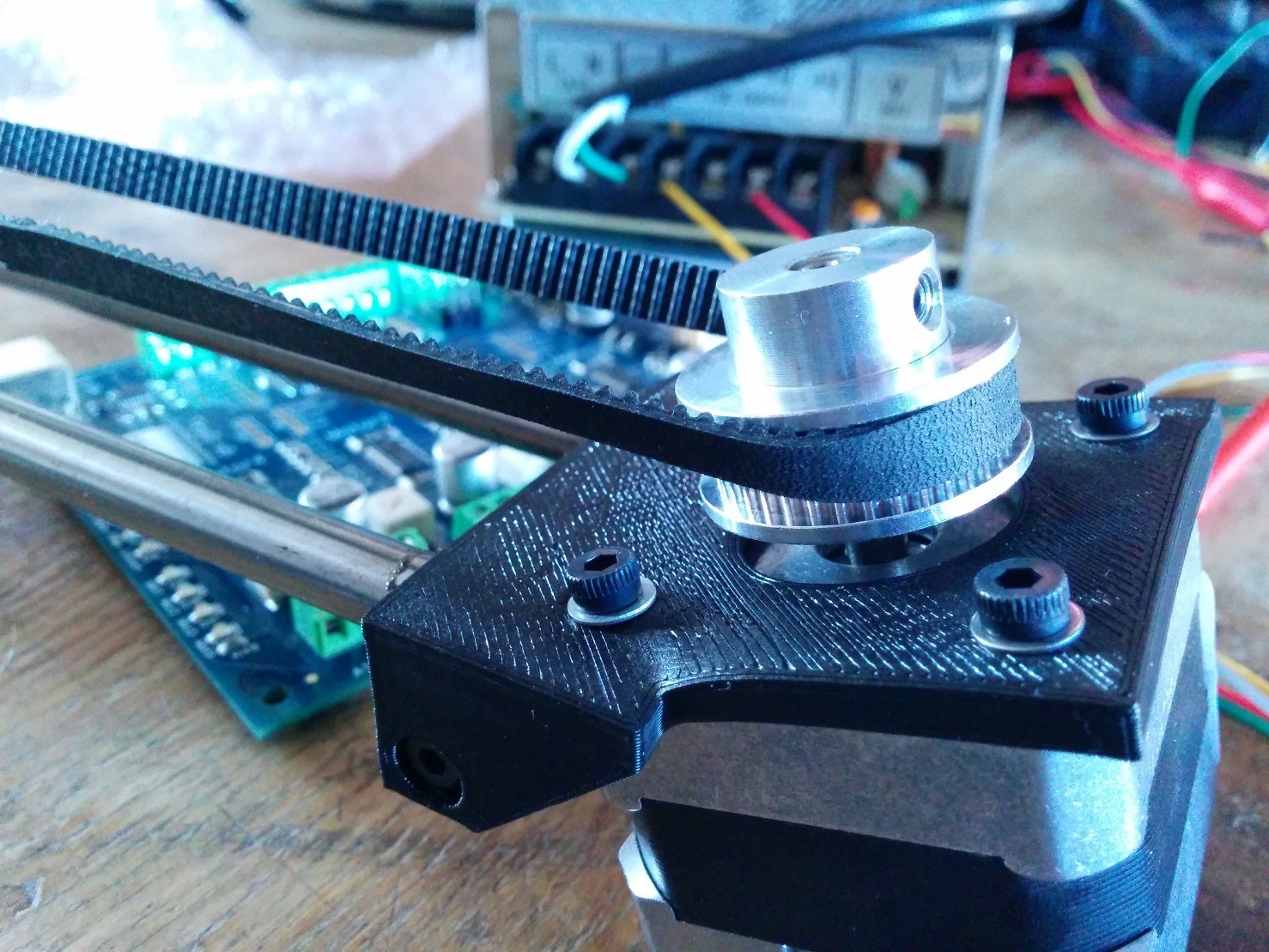
@cypnk If you can add an encoder for closed loop control, this allows the power to be ramped up as needed. The "Mechaduino" has a neat Hall Effect encoder (AD5047D) combined with a stepper driver that fits on the back of a NEMA-17 motor.